$5,00
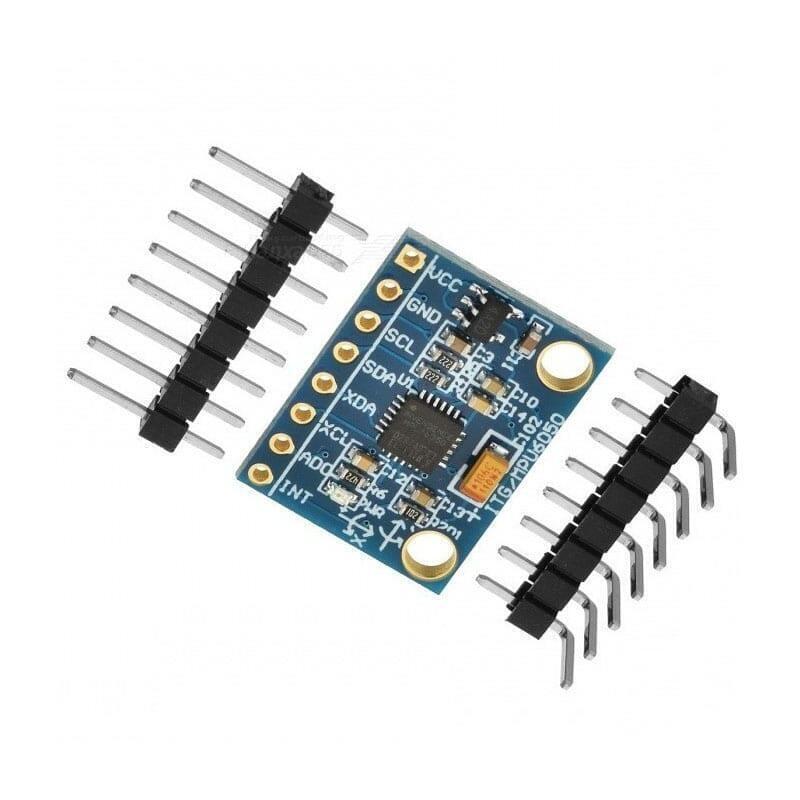
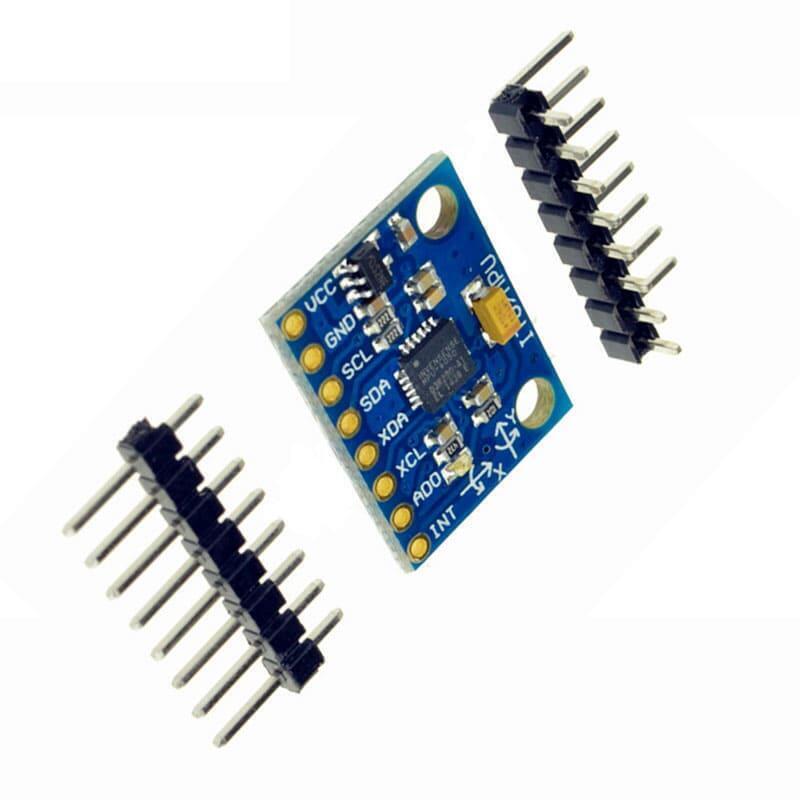
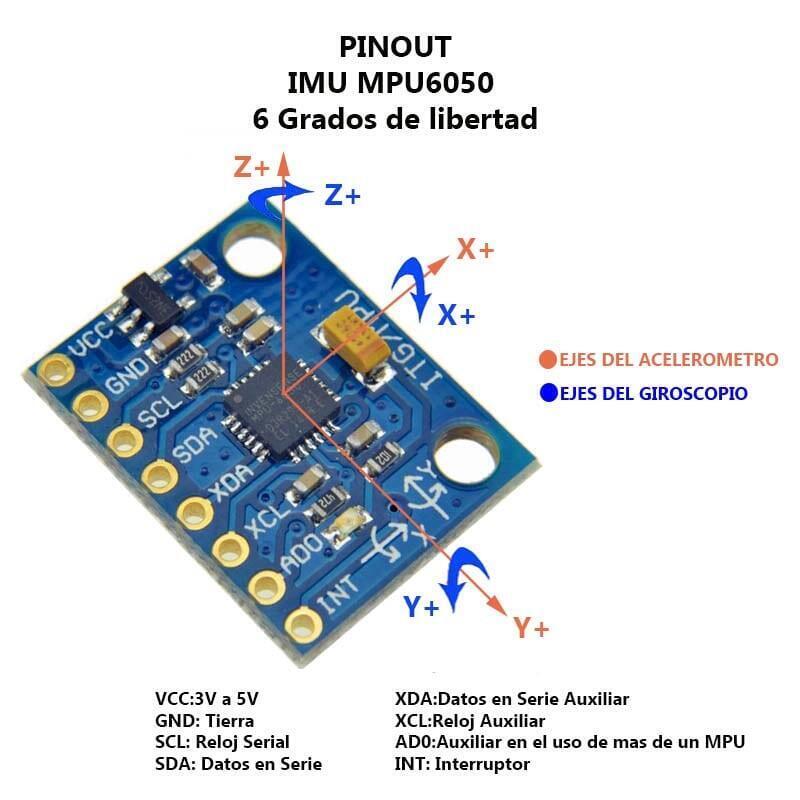
El IMU MPU6050 6 Grados de libertad es un circuito integrado que combina un giroscopio de 3-ejes y un acelerómetro de 3-ejes en el mismo chip, teniendo 6 grados de libertad(DoF).
El IMU MPU6050 6 Grados de libertad es un circuito integrado que combina un giroscopio de 3-ejes y un acelerómetro de 3-ejes en el mismo chip, teniendo 6 grados de libertad(DoF).
¿Para qué sirve el IMU MPU6050?
El MPU6050 es útil para sistemas de control, medición de vibración, sistemas de medición inercial (IMU), detección de caídas, sensor de distancia y/o velocidad o goniometría (medición de ángulos).
ESPECIFICACIÓN Y CARACTERÍSTICAS
- Voltaje de funcionamiento: 3.3V a 5V
- Chip: MPU-6050.
- Grados de libertad (DoF): 6
- Protocolo de comunicación: I2C
- Convertidor analógico a digital: 16 bit en todos los ejes.
- Rango
- Giroscopio: +/-250,+/- 500,+/- 1000 y +/- 2000° /s(dps)
- Acelerómetro: +/-2 ,+/-4 ,+/-8 y +/-16g
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
¿Cómo funciona el IMU MPU6050?
Este sensor se comunica a través de la interfaz I2C, cuenta con un regulador de tensión a 3.3V (por lo cual se puede alimentar con los 5V de placas de Arduino).
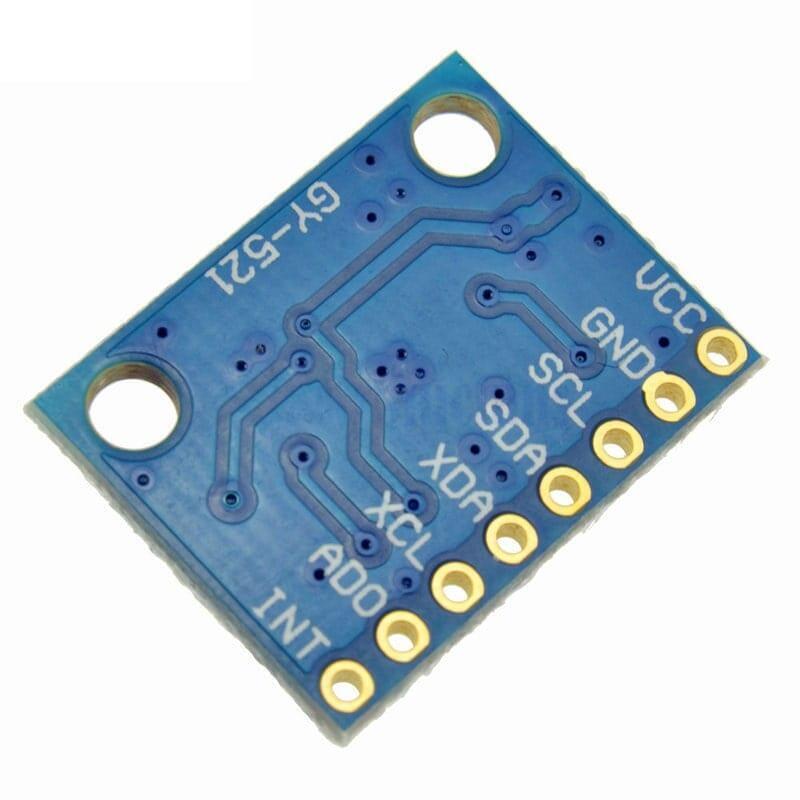
Las direcciones para poder trabajar en I2C son:
| PIN AD0 | Dirección I2C |
|---|---|
| AD0=HIGH (5V) | 0x69 |
| AD0=LOW (GND o NC) | 0x68 |
Esto permitirá usar dos dispositivos en el mismo bus o en caso de que haya un conflicto de dirección con otro dispositivo en el bus. A continuación las conexiones para usar el dispositivo en Arduino UNO:
 Conexión del Arduino a MPU-6050 para interfaz de I2C
Conexión del Arduino a MPU-6050 para interfaz de I2C
Código de prueba para MPU-6050 GY-521
Se presenta el siguiente código con la finalidad de que puedas probar el funcionamiento del MPU , cabe mencionar que se requiere calibración y los datos arrojados son de fabrica. Para mas información revisar el datasheet.
#include "Wire.h" //Librería para poder comunicarse con dispositivos por I2C
const int MPU_ADDR = 0x68; // Dirección I2C del MPU-6050. Si AD0(0x69) HIGH, de lo contrario I2C(0x69)es LOW
int16_t a_x, a_y, a_z; // variables para el acelerómetro
int16_t g_x, g_y, g_z; // variables para giroscopio
int16_t t; // variables para temperatura
char tmp_str[7]; // variable temporal con 7 carácters
char* convert_int16_to_str(int16_t i) { // variables para conversión de int16 a texto
sprintf(tmp_str, "%6d", i);
return tmp_str;
}
void setup() {
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(MPU_ADDR); // Comienza la comunicación entre GY-521 por I2C
Wire.write(0x6B); // registro para direcciones
Wire.write(0); // empieza en cero (encender MPU-6050)
Wire.endTransmission(true);
}
void loop() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B); // se empieza con el registro 0x3B salida del acelerómetro(ACCEL_XOUT_H)
Wire.endTransmission(false); // Parámetro que indica que el Arduino mandara reset. O se mantendrá la conexión activa.
Wire.requestFrom(MPU_ADDR, 7 * 2, true); // solicitud de 14 registros
// "Wire.read()<<8 | Wire.read();" significa 2 registros son leídos y guardados en la misma variable
a_x = Wire.read() << 8 | Wire.read(); // lectura del registro para acelerómetro: 0x3B (A_XOUT_H) y 0x3C (A_XOUT_L) (HIGH/LOW)
a_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x3D (A_YOUT_H) y 0x3E (A_YOUT_L)(HIGH/LOW)
a_z = Wire.read() << 8 | Wire.read(); //lectura del registro: 0x3F (A_ZOUT_H) y 0x40 (A_ZOUT_L)(HIGH/LOW)
t = Wire.read() << 8 | Wire.read(); // lectura del registro para temperatura: 0x41 (T_OUT_H) y 0x42 (T_OUT_L)(HIGH/LOW)
g_x = Wire.read() << 8 | Wire.read(); // lectura del registro para giroscopio: 0x43 (G_XOUT_H) and 0x44 (GYRO_XOUT_L)
g_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x45 (G_YOUT_H) and 0x46 (G_YOUT_L)
g_z = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x47 (G_ZOUT_H) and 0x48 (G_ZOUT_L)
// Impresión de la información
Serial.print("aX = "); Serial.print(convert_int16_to_str(a_x));
Serial.print(" | aY = "); Serial.print(convert_int16_to_str(a_y));
Serial.print(" | aZ = "); Serial.print(convert_int16_to_str(a_z));
Serial.print(" | tmp = "); Serial.print(t / 340.00 + 36.53); // ecuación recomendada en el datasheet para la temperatura
Serial.print(" | gX = "); Serial.print(convert_int16_to_str(g_x));
Serial.print(" | gY = "); Serial.print(convert_int16_to_str(g_y));
Serial.print(" | gZ = "); Serial.print(convert_int16_to_str(g_z));
Serial.println();
// espera 1s para la siguiente lectura
delay(1000);
}
ENLACES EXTERNOS
Productos relacionados
-
$10,50Vista rápida
La Celda Peltier TEC1-12706 es un dispositivo de enfriamiento termoeléctrico de estado solido. Se usa para enfriar o calentar un objeto y es ideal para experimentos o controles de temperatura, si se utiliza por largos periodos de tiempo se recomienda utilizar un disipador en la zona caliente, además de recubrir la zona con pasta termina para una mejor termo conducción.
-
$7,68Vista rápida
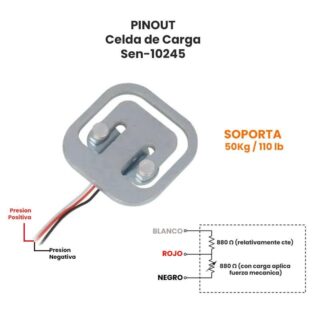
La Celda de Carga 50Kg Sen-10245 es un transductor que puede medir el peso o la fuerza y la convierte en una señal eléctrica, mediante un dispositivo mecánico, la fuerza que se desea medir deforma el sensor y convierte el desplazamiento o deformación en señales eléctricas. Soporta cerca de 110 libras (aproximadamente 50 Kg).
-
$89,90Vista rápida
-
$24,29Vista rápida
El sensor MLX90614 es un termómetro infrarrojo para mediciones de temperatura sin contacto, el cual está diseñado para ser sensible a la radiación infrarroja emitida por un objeto a distancia, puede obtener lecturas desde los -70°C hasta 380°C, con una precisión de 0.5°C. La salida del sensor es lineal y se compensa de acuerdo a las variaciones de la temperatura ambiente.
-
$9,30Vista rápida
El Si7021 es un sensor digital de humedad y temperatura digital de bajo costo y fácil de usar. Este sensor es ideal para la detección del medio ambiente y el registro de datos y es perfecto para la construcción de estaciones meteorológicas o un sistema de control de humedad. Todo lo que necesita son dos líneas para de comunicación I2C y tendrá lecturas de humedad relativa y lecturas de temperatura muy precisas !