$6,20
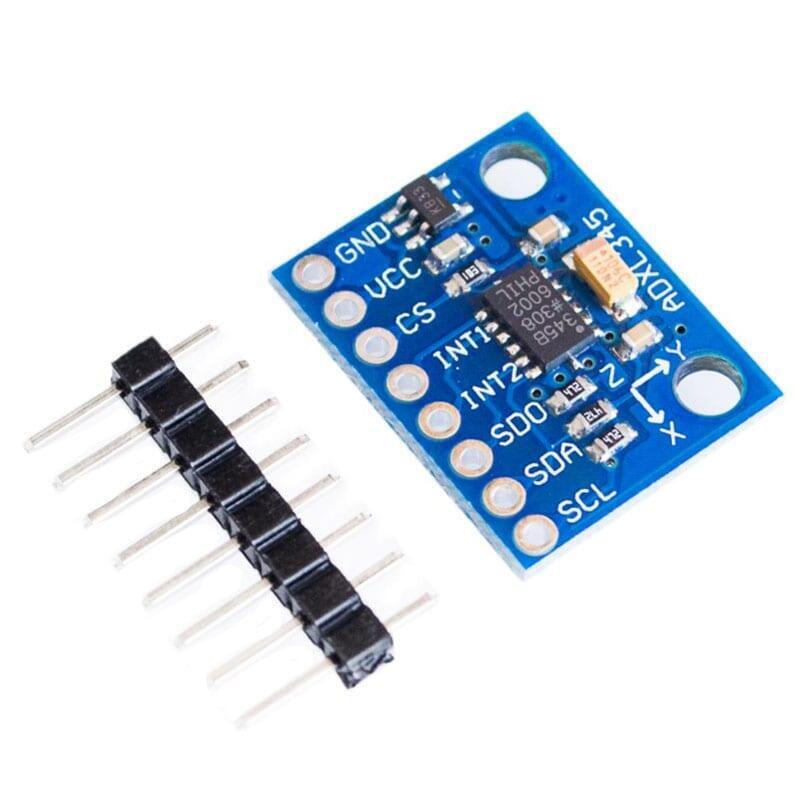
El Acelerometro ADXL345 GY-291 realiza detección de movimiento en 3 ejes con una resolución en medición (13 bits) de hasta ± 16 g. Los datos de salida se componen de 16 bits y se puede acceder a través de la interfaz digital SPI (3 o 4 cables) o I2C.
El Acelerometro ADXL345 GY-291 realiza detección de movimiento en 3 ejes con una resolución en medición (13 bits) de hasta ± 16 g. Los datos de salida se componen de 16 bits y se puede acceder a través de la interfaz digital SPI (3 o 4 cables) o I2C.
¿Para qué sirve el Acelerometro ADXL345 GY-291?
El Acelerometro ADXL345 GY-291 es ideal para:
- Aceleración estática en las aplicaciones de detección de inclinación, su alta resolución (3,9 mg / LSB) permite medir cambios de inclinación inferiores a 1,0 °
- Aceleración dinámica resultante del movimiento o el choque.
Adicional es funcional para la detección de actividad e inactividad detectando la presencia o la falta de movimiento al comparar la aceleración en cualquier eje con los umbrales establecidos por el usuario. La detección de toques detecta los toques simples y dobles en cualquier dirección. La detección de caída libre detecta si el dispositivo se está cayendo. Estas funciones se pueden asignar individualmente a cualquiera de los dos pines de salida de interrupción.
ESPECIFICACIÓN Y CARACTERÍSTICAS
- Voltaje de funcionamiento : 3 V a 5 V
- I/O rango de voltaje: 1.7 V a 3.6V
- Chip Principal: ADXL345
- Grados de libertad (DoF): 3
- Rango de medición: ± 2 g a ± 16 g (± 2g / ± 4g / ± 8g / ± 16g.)
- Rango de temperatura (−40°C to +85°C)
- Dimensiones: 3 mm × 5 mm × 1 mm
- Detección:
- Caída Libre
- Actividad/Inactividad
- De un solo toque/doble toque
- Corriente:
- 40 µA in modo medición
- 0.1 µA in modo reposo
- Resolución:
- Default: 10-bit.
- Máxima: 13-bit a ±16 (manteniendo 4 mg/LSB como factor de escala en todos los rangos)
- Interfaz:
- SPI (3 o 4 hilos) a 5 MHz
- I2C (2 hilos) a 100kHz-400kHz
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
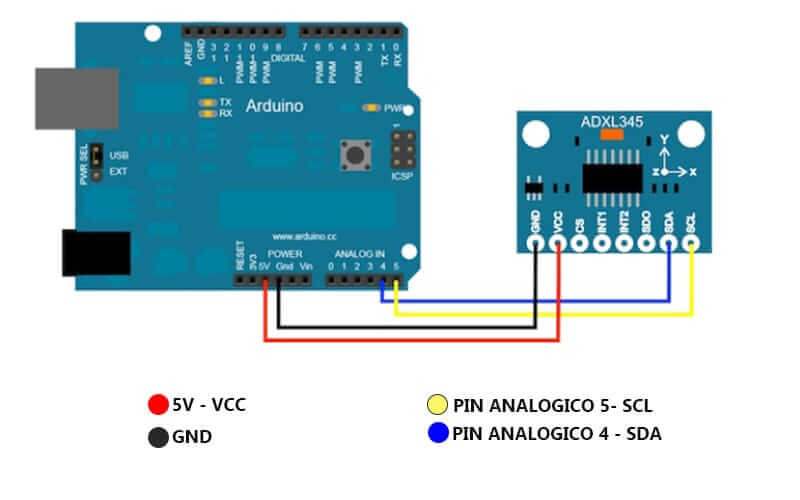
Uso de la interfaz I2C y conexión a Arduino.
Para utilizar el Acelerometro con la interfaz de I2C con Arduino solo requerimos utilizar los pines SDA y SCL ,conexión de tierras (GND) y alimentación a la placa (3.3V ).
Código prueba para ADXL345
Se presenta el siguiente código con la finalidad de que puedas probar el funcionamiento del MPU , cabe mencionar que se requiere calibración y los datos arrojados son de fabrica. Para mas información revisar el datasheet.
#include <Wire.h> //Librería para poder comunicarse con dispositivos por I2C
#define DEVICE (0x53) // Dirección del ADXL345 especificada en el datasheet para iniciar comunicación
byte _buff[6];
char POWER_CTL = 0x2D; //Registro de control
char DATA_FORMAT = 0x31;
char DATAX0 = 0x32; //X-Eje Data 0
char DATAX1 = 0x33; //X-Eje Data 1
char DATAY0 = 0x34; //Y-Eje Data 0
char DATAY1 = 0x35; //Y-Eje Data 1
char DATAZ0 = 0x36; //Z-Eje Data 0
char DATAZ1 = 0x37; //Z-Eje Data 1
void setup() {
Wire.begin();
Serial.begin(9600);
writeTo(DATA_FORMAT, 0x01); //Coloca al ADXL345 dentro +/- Rango de 4G para escribir el valor en 0x01 al registro DATA_FORMAT
writeTo(POWER_CTL, 0x08); //Coloca al ADXL345 en Mode Medición para escribir el valor en registro 0x08 al registro POWER_CTL
}
void loop() {
readAccel(); // función de lectura de la inclinación en x/y/z
delay(1000); // lecturas cada segundo
}
void readAccel() { //función de lectura de la inclinación en x/y/z
uint8_t dato = 6; //Lectura de 6 bit
readFrom( DATAX0, dato, _buff); //lectura del acelerómetro en el registro DATX0 de ADXL345
// cada eje tiene una resolución de 10 bits empezando desde LSM
// conversión de bytes a entero desde los buffer de lectura
int x = (((int)_buff[1]) << 8) | _buff[0];
int y = (((int)_buff[3]) << 8) | _buff[2];
int z = (((int)_buff[5]) << 8) | _buff[4];
//impresión de los valores de cada eje
Serial.print("x: ");
Serial.print( x );
Serial.print(" y: ");
Serial.print( y );
Serial.print(" z: ");
Serial.println( z );
}
void writeTo(byte address, byte val) { //función para escritura de datos en los registros
Wire.beginTransmission(DEVICE); // comienza la comunicación
Wire.write(address); // envía las direcciones de registros
Wire.write(val); // envió del valor
Wire.endTransmission(); // fin de la comunicación
}
void readFrom(byte address, int num, byte _buff[]) { // Funcion para la lectura de numero de bytes para las direcciones de registros en el buffer
Wire.beginTransmission(DEVICE); // comienza la comunicación
Wire.write(address); // envia la direccion que fue leida
Wire.endTransmission(); // fin de la transmisión
Wire.beginTransmission(DEVICE); // comienza la comunicación
Wire.requestFrom(DEVICE, num); // solicitud de 6 bytes al MPU
int i = 0;
while (Wire.available()) { // El MPU puede enviar menos datos que los requeridos(abnormal)
_buff[i] = Wire.read(); // recibe bytes en los guarda en el buffer
i++;
}
Wire.endTransmission(); // fin de la transmisión
}
ENLACES EXTERNOS
Productos relacionados
-
$15,00Vista rápida
El Sensor Huella As608 es un sensor biométrico, permite realizar sistemas de procesamiento digital de imágenes de manera interna con un DSP (Procesador de Señales Digitales). Además incluye capacidades de comparación en base de datos y actualización de la misma. El dispositivo funciona con el protocolo serial, por lo que puede ser utilizado con cualquier microcontrolador o tarjeta de desarrollo.
-
$29,90Vista rápida
Modulo Receptor 4 Canales es un modulo RF que funciona a 12V DC, cuenta con control remoto inalámbrico emisor de 433Mhz o bien si requieres tener un segundo control remoto como repuesto podrás más de 2 o vincular hasta 5 controles.
-
$6,50Vista rápidaEl termopar es un transductor formado de la unión de dos metales que produce una diferencia de potencial en función de la temperatura, pero esta diferencia es demasiado pequeña si se quiere utilizar un microcontrolador, es ahí donde el CI MAX6675 entra, pues el MAX6675 contiene dentro la electrónica necesaria para amplificar, compensar y convertir la señal analógica a digital, llevando el termopar hacia los sensores para instrumentistas.
-
$3,50Vista rápida
El dimmer 2000W 127V es un regulador de corriente alterna para control del voltaje de salida de potencia de alguna carga eléctrica(ventilador, alumbrado, motor, etc). Este dimmer consta de un dispositivo semiconductor llamado triac o SCR, el triac consiste en la conexión de 2 tiristores en paralelo pero conectados en sentidos opuestos y compartiendo la misma compuerta. El control se lleva acabo por el triac que realiza la función de encendido al “paso por cero” de la tensión. La disminución del valor eficaz se logra recortando la señal en el momento de subida en el punto que se elija (si cortamos la señal cuando la onda llega a 60 V , por ejemplo : se encenderá muy poco, mientras que si la cortamos al llegar a 120 V se encenderá casi al máximo).
-
$9,30Vista rápida
El Si7021 es un sensor digital de humedad y temperatura digital de bajo costo y fácil de usar. Este sensor es ideal para la detección del medio ambiente y el registro de datos y es perfecto para la construcción de estaciones meteorológicas o un sistema de control de humedad. Todo lo que necesita son dos líneas para de comunicación I2C y tendrá lecturas de humedad relativa y lecturas de temperatura muy precisas !