$1,00
Este módulo ha sido diseñado como una alternativa a los conocidos sensores de movimiento PIR (Sensor Infrarrojo Pasivo), ampliamente utilizados en alarmas antirrobo, y en luces de seguridad. Contiene en su interior todos los componentes electrónicos esenciales, incluyendo un regulador de tensión interno en el chip, que entrega 3,3V.
35 disponibles
Este módulo ha sido diseñado como una alternativa a los conocidos sensores de movimiento PIR (Sensor Infrarrojo Pasivo), ampliamente utilizados en alarmas antirrobo, y en luces de seguridad. Contiene en su interior todos los componentes electrónicos esenciales, incluyendo un regulador de tensión interno en el chip, que entrega 3,3V.

Al igual que el sensor PIR, este sensor también detecta solamente algo que esté en movimiento dentro de su rango de detección, pero en lugar de percibir la radiación del cuerpo negro (infrarrojo) de una persona que se mueve, este sensor utiliza una técnica de “radar Doppler de microondas” para detectar cualquier tipo de objetos en movimiento.
Tamaño:

Tiene un rango de sensibilidad de alrededor de 7 metros. Cuando se dispara, su pin de salida de nivel TTL (OUT) cambia de BAJO (0 V) a ALTO (3,3 V) por un tiempo de 2 a 3 segundos antes de volver a su estado inactivo (BAJO).
Características:
1. Voltaje de Operación: 4-28V
2. Corriente de Operación: 2,8mA (típica); 3mA (máx)
3. Distancia de Detección: 5-7m
4. Potencia de Transmisión: 20mW (típica); 30mW (máx)
5. Voltaje de Salida: 3,2-3,4V
6. Capacidad de Corriente del Voltaje de Salida: 100mA
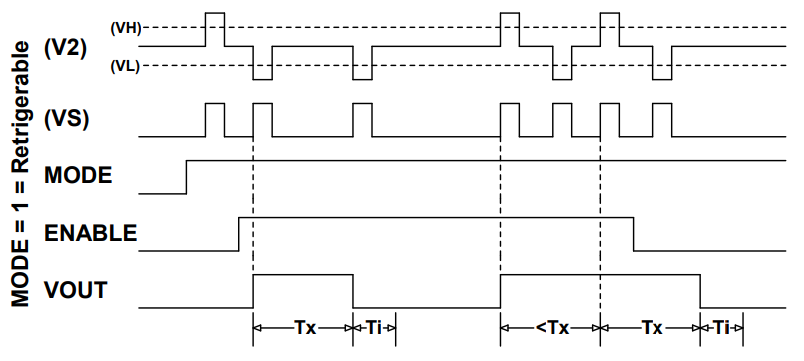
7. Modo de Disparo: repetición de disparo
8. Nivel de Salida Bajo: 0V
9. Nivel de Salida Alto: 3,3V
10. Temperatura de Operación: -20º a 80º celsius
11. Temperatura de almacenamiento: -40º a 100º celsius
Como se ve en sus características, el sensor puede manejar un amplio rango de alimentación: desde 4 hasta 28 V. El pin de salida se puede utilizar para una multitud de tareas, como el manejo de un indicador auditivo o visual, o incluso para conectarlo a la entrada de un microcontrolador para su procesamiento.
Donde se instale, se debe evitar que haya partes metálicas delante del módulo. Del mismo modo, siempre hay que mantener un mínimo de espacio libre de 1 cm en la parte frontal y posterior del módulo.
Pines de salida:
CDS – Entrada de desactivación del sensor (bajo = desactivado)
VIN – entrada de alimentación de 4 a 28V CC
OUT – ALTO (3,3V) movimiento detectado / BAJO (0V) inactivo
GND – Tierra / 0V
3V3 – Salida de CC regulada (100mA máx)

El LDR es opcional. Si se instala, inhibe el funcionamiento del módulo cuando recibe la luz del día. Es evidente que se convierte en una función útil cuando se utiliza el sensor para encender luces de seguridad, ya que al hacerse de día dejará de encenderla por no ser necesaria esa iluminación con luz diurna.
La distancia de detección, y la duración de la salida del módulo cuando hay una detección, se pueden ajustar añadiendo componentes pasivos en unos puntos de soldadura de la parte posterior de la placa de circuito.
Los elementos opcionales para realizar distintos ajustes van soldados sobre los puntos marcados C-TM, R-GN y R-CDS (abajo, imagen del lado de la soldadura de la placa).
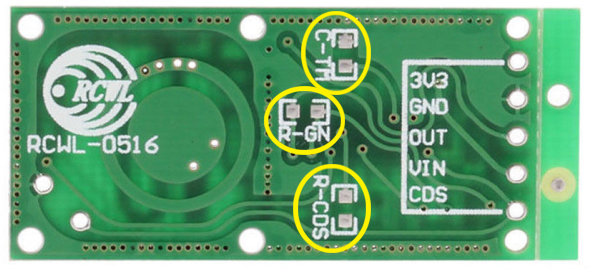
Hay puntos de soldadura donde agregar una resistencia dependiente de la luz LDR (marcado CDS). El pin de entrada CDS sirve para desactivar (anular la opción de detección de luz ambiental) en el sensor, si fuese necesario.
C-TM: Ajusta el tiempo de activación de repetición (predeterminado: 2 segundos). Agregar un condensador dará una repetición más extensa del tiempo de disparo.
R-GN: ajuste de la distancia de detección (por defecto 7 metros). Añadiendo una resistencia a la detección la distancia se hará más corta. Si está conectado con una resistencia de 1 MΩ, el rango de detección es de aproximadamente 5 m.
R-CDS: al agregar una resistencia (en paralelo con la resistencia interna de 1 MΩ), el usuario puede cambiar el umbral de detección de luz según su necesidad individual. Esto es aplicable solo cuando hay un sensor de luz soldado en los puntos de soldadura (CDS) en la parte frontal de la placa de circuito.
Una resistencia de 47–100K funciona bien con un LDR estándar de 5 mm.
Funcionamiento
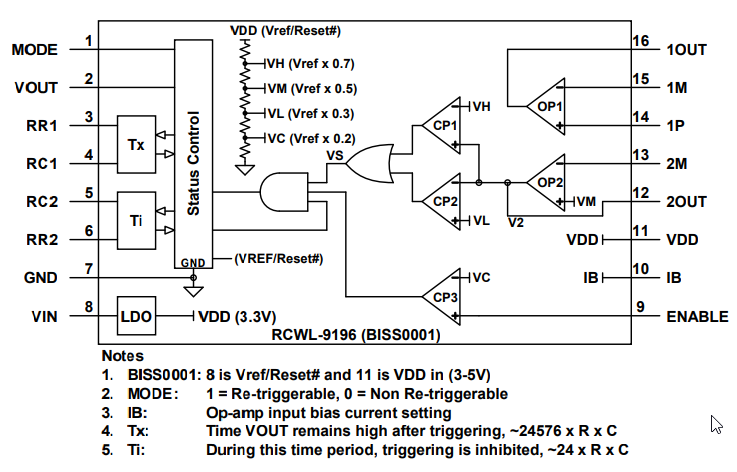
La electrónica del módulo posee dos secciones igualmente importantes: un transmisor / receptor / mezclador de frecuencia de microondas basado en un transistor NPN de alta frecuencia MMBR941M, y una sección de frecuencia mucho más baja basada en un circuito integrado RCWL-9196.
Técnicamente, la sección de microondas se parece a un «oscilador Colpitt» con el inductor requerido (y los capacitores) hechos con trazas de la placa de circuito. El inductor (~ 10 nH) es el trazado de la curva S en la superficie superior, y los condensadores son la estructura en anillo en la superficie inferior, y también el bloque rectangular a la izquierda de la S curva.
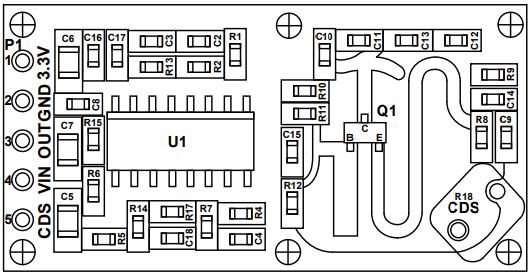
Circuito de la placa

Ubicación de los componentes
Circuito del chip
Dos modos de salida

Un circuito de prueba
Antes de profundizar en algo, le recomiendo que se familiarice con el hardware y el procedimiento inicial de instalación/ejecución y tratar de hacer algunos pequeños experimentos.
Aunque puede usar RCWL-0516 solo con una fuente de alimentación y un LED en su salida, se puede agregar un circuito controlador de relé para controlar cargas externas que requieran mayor corriente al accionarse cuando se detecta un movimiento.
Esquemático de la primera prueba:
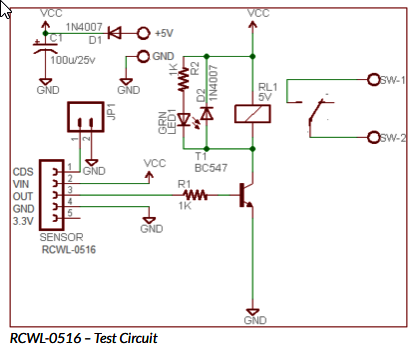
Tenga en cuenta que la resistencia de 1 k (R1) no es necesaria ya que el módulo tiene una resistencia de 1 kΩ entre el pin OUT y el pin de salida real del chip de 16 patas (RCWL-9196).
El relé (RL1) en el circuito es accionado por un transistor estándar BC547 o 2N3904 (T1), y hay un indicador de «relé encendido» (LED1) que se enciende cuando el relé está en estado activo. Si lo desea, también puede utilizar otros relés de voltaje diferente. Sin embargo, en ese caso, la entrada de la fuente de alimentación (que es de 5 V) tendría que ser cambiada (con algunas otras modificaciones menores, por supuesto). El conector de 2 pines (JP1) está reservado para pruebas futuras, y sólo es utilizable cuando hay un sensor de luz conectado al módulo.
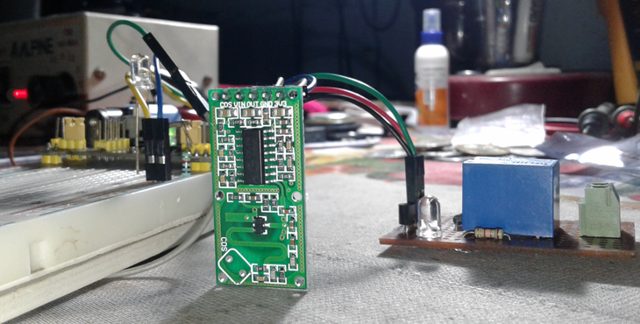
Para fines experimentales, este circuito se puede construir en una placa de pruebas. Se puede usar un conector de 5 patas (sólo se requieren tres para la primera prueba) para conectar el módulo de radar.
A continuación se muestra el montaje de esta configuración de prueba (ver también el video de prueba):
Video
Efecto Doppler
En principio, el efecto Doppler es un cambio en la frecuencia recogida por un receptor de la señal reflejada en un objeto en movimiento. En los radares de efecto Doppler, para detectar un objeto en movimiento se puede usar una señal no modulada (CW). El receptor del sensor procesa la señal transmitida con la señal reflejada en un objetivo.
Debido al efecto Doppler, la velocidad de desplazamiento de un objeto en relación con la antena provoca un cambio en la frecuencia. Se puede estimar, simplemente, que la frecuencia Doppler (que es la frecuencia obtenida en el receptor) es la cantidad de medias-ondas de la frecuencia de señal enviada por el objetivo por segundo. Una velocidad más alta producirá una frecuencia Doppler más alta. Un sistema de este tipo, con una disposición para detectar la fase de la señal, también puede indicar el sentido del movimiento del objetivo: los objetos que se alejan generan una frecuencia más baja que la de la señal de sondeo, mientras que los objetos que se aproximan generan una frecuencia más alta.
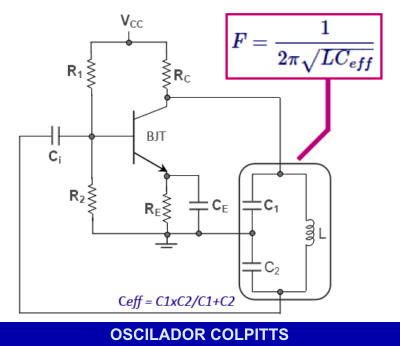
Oscilador Colpitts
El oscilador Colpitts es un tipo popular de oscilador LC inventado por Edwin Colpitts en 1918. La figura que se ve a continuación muestra un oscilador Colpitts típico basado en un BJT con un circuito tanque, en el cual un inductor L está conectado en paralelo a la combinación en serie de condensadores C1 y C2. La frecuencia del oscilador Colpitts depende de los componentes de su circuito tanque, y se puede calcular mediante una fórmula simple (ver figura). Por ejemplo: si L = 27 uH, C1 = 1 nF y C2 = 15 nF, entonces F = 1 MHz. Tenga en cuenta que el oscilador Colpitts se puede sintonizar variando la inductancia o la capacitancia.
Diagrama de un oscilador Colpitts
En mi opinión, el sensor de microondas RCWL-0516 es una poderosa alternativa al sensor PIR común, pero este modelo tiene una documentación muy limitada (escasa), lo que lo convierte en un problema para los principiantes. Además de leer el material «chino» encontrado, también se han hecho algunas investigaciones para agregar alguna información para que alguien pueda usarla rápidamente. Mientras que, por el momento, no se ve otro uso para este módulo de sensor aparte de su aplicación de detección de movimiento, se puede adaptar fácilmente para agregar o modificar funciones. Una de ella sería una discriminación más detallada de las trayectorias de objetos que se alejan o se acercan. Debido a sus características de emisión de RF, no se deben colocar sensores a menos de 1 metro uno de otro, pero con dos sensores colocados a la distancia correcta sería posible, también, conocer si el objeto en movimiento lo hace de derecha a izquierda o a la inversa, de izquierda a derecha. Combinando ambas detecciones, es decir, aproximación y alejamiento, y desplazamiento en sentido horizontal respecto a los sensores, sería posible saber detalles de cómo se está desplazando el objeto detectado en el área monitoreada.

[Varias partes de este artículo están basadas en la recopilación de Joe Desbonnet y otros colaboradores mencionados en ésta en GitHub bajo licencia Creative Commons y autorización expresa del autor]
Productos relacionados
-
$3,52Vista rápida
Lector de Memorias Micro SD compatible con Arduino, es capaz de realizar la lectura de información contenida en una tarjeta micro SD a través del chip LVC125A.
-
$10,50Vista rápida
La Celda Peltier TEC1-12706 es un dispositivo de enfriamiento termoeléctrico de estado solido. Se usa para enfriar o calentar un objeto y es ideal para experimentos o controles de temperatura, si se utiliza por largos periodos de tiempo se recomienda utilizar un disipador en la zona caliente, además de recubrir la zona con pasta termina para una mejor termo conducción.
-
$8,30Vista rápida
Esta Pantalla LCD funciona cuenta con un conversor I2C que facilita el uso y solo usa dos cables para recibir los datos.
-
$5,70Vista rápida
¿Qué es el Módulo MQ2?
El sensor de gas Módulo MQ2 es un sensor electro-químico que varia su resistencia al estar contacto con LP, butano, hidrógeno e incluso humo. Cuenta con 2 salidas una analógica y otra digital.
¡Queda(n) 93 disponible(s)! -
$19,50Vista rápida
Este módulo permite trabajar fácilmente con el circuito integrado HX711, que facilita en gran medida la interfaz con celdas de carga para medir peso / fuerza. Al conectar el amplificador al microcontrolador es posible medir los cambios en la resistencia de la celda de carga y con algunas calibraciones y calculos, es posible obtener medidas bastante precisas. Esto es ideal para crear tu propia báscula en aplicaciones industriales, realizar sistemas de control de inventario, sistemas de detección de presencia, etc.