


$25,00
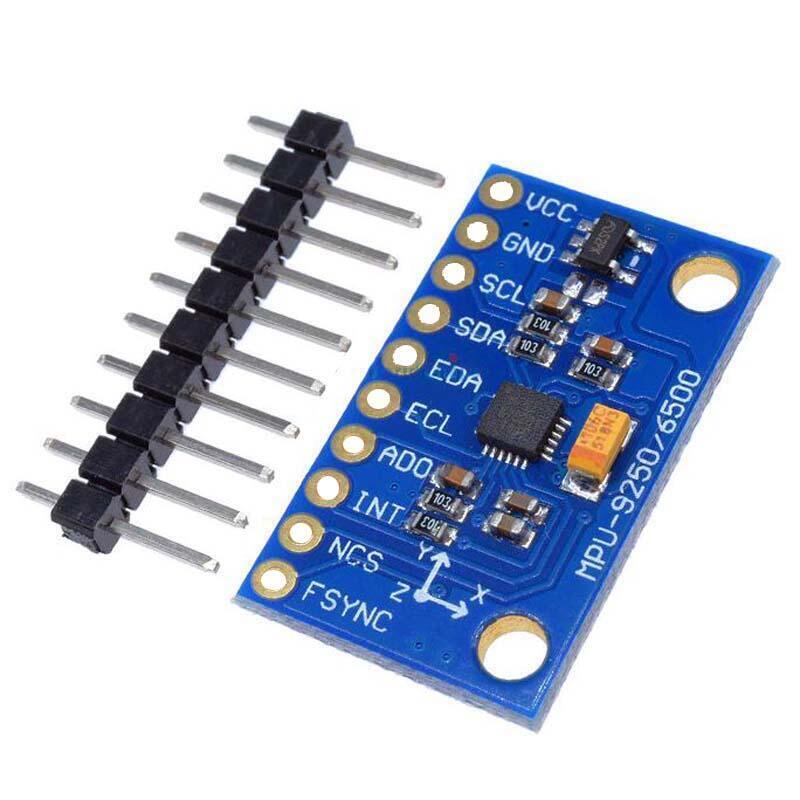
El módulo MPU-9250 9DOF realiza detección de movimiento en 9 ejes, ya que combina giroscopio de 3 ejes(3DOF), un acelerómetro de 3 ejes(3DOF) y un magnetómetro AK8963 de 3 ejes (3DOF) en el mismo chip DMP (Procesador digital de movimiento) capaz de realizar complejos algoritmos para la captura del movimiento de estos 9 ejes(9DOF). La comunicación puede realizarse tanto por bus SPI cómo por bus I2C, por lo que es sencillo obtener los datos medidos.
El módulo MPU-9250 9DOF realiza detección de movimiento en 9 ejes, ya que combina giroscopio de 3 ejes(3DOF), un acelerómetro de 3 ejes(3DOF) y un magnetómetro AK8963 de 3 ejes (3DOF) en el mismo chip DMP (Procesador digital de movimiento) capaz de realizar complejos algoritmos para la captura del movimiento de estos 9 ejes(9DOF). La comunicación puede realizarse tanto por bus SPI cómo por bus I2C, por lo que es sencillo obtener los datos medidos.
Contiene 10 pines header rectos para soldar a la placa.
¿Para qué sirve el el módulo MPU-9250 9DOF ?
El módulo MPU-9250 9DOF es usado para servicios basados en ubicación principalmente, pero mas estructurado funciona también para control /navegación de aplicaciones de interfaz usuario “sin contacto”, para atajos gestuales, juegos habilitados con movimientos, auriculares y juegos portátiles, controles remotos 3D para pantallas y decodificadores conectados a Internet, sensores portátiles para salud, fitness y deportes.
Frecuentemente se encuentran integrados en módulos que incorporan la electrónica necesaria para conectarla de forma sencilla a un Arduino. En la mayoría de los módulos, esto incluye un regulador de voltaje que permite alimentar directamente a 5V.
ESPECIFICACIÓN Y CARACTERÍSTICAS
- Módulo Modelo: GY-9250 /GY -6500
- Sensor: MPU-9250/6500
- Voltaje de alimentación: 3V a 5V (con regulador interno)
- Grados de libertad (DoF): 9
- Dimensiones: 26 mm x 15.5 mm x 2.6 mm (sin header)
- Interfaz:
- I2C (400kHz) y SPI (1MHz)
- Registros de interrupción SPI (20MHz.)
Características del Giroscopio
- Rango de Giroscopio: 250/500/1000/2000 grados/segundo
- Corriente de Operación: 3.2mA
- Corriente en modo sleep: 8uA
Características del Acelerómetro
- Rango de Aceleración: ± 2 ± 4 ± 8 ± 16 g
- Convertidor ADC: 16 bit
- Corriente de Operación: 450 uA
- Corriente en modo sleep: 8uA
Características del Magnetómetro
- Funcionamiento por Efecto Hall
- Corriente de Operación: 280µA a 8Hz
- Rango del campo magnético: ± 4800uT (completo)
- Sensibilidad: 0,6 μT/LSB
- Resolución de salida:
- 14 bit (0.6µT/LSB)
- 16 bit (15µT/LSB)
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
Uso de la interfaz I2C y conexión a Arduino.
El módulo utiliza la interfaz I2C para comunicarse con la MCU. Admite dos direcciones I2C diferentes; 0x68 y 0x69. Eso permite usar dos dispositivos en el mismo bus o en caso de que haya un conflicto de dirección con otro dispositivo en el bus.
El pin ADO determina la dirección I2C a usar. Este pin tiene una resistencia pull-down de 4.7K incorporada en el módulo. Si el pin se deja desconectado, la línea se reducirá y la dirección I2C predeterminada será 0x68. Para seleccionar 0x69, conecte el pin ADO a 3.3V.
Los pines SCL y SDA se conectan a los pines SCL y SDA en la MCU.
La dirección I2C auxiliar con pines etiquetados como EDA y ECL son un bus I2C controlado por el MPU-9250 para que pueda comunicarse directamente con otros sensores para que pueda obtener información adicional para sus cálculos internos.

Conexión del Arduino a MPU-9550 para interfaz de I2C
Código prueba para MPU -6050 GY-521
Se presenta el siguiente código con la finalidad de que puedas probar el funcionamiento del MPU , cabe mencionar que se requiere calibración y los datos arrojados son de fabrica. Para mas información revisar el datasheet.
#include "Wire.h" //Librería para poder comunicarse con dispositivos por I2C
const int MPU_ADDR = 0x68; // Dirección I2C del MPU-6050. Si AD0(0x69) HIGH, de lo contrario I2C(0x69)es LOW
int16_t a_x, a_y, a_z; // variables para el acelerómetro
int16_t g_x, g_y, g_z; // variables para giroscopio
int16_t m_x, m_y, m_z; // variables para magnetómetro
char tmp_str[7]; // variable temporal con 7 carácteres
char* convert_int16_to_str(int16_t i) { // variables para conversión de int16 a texto
sprintf(tmp_str, "%6d", i);
return tmp_str;
}
void setup() {
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(MPU_ADDR); // Comienza la comunicación entre GY-6500 por I2C
Wire.write(0x6B); // registro para direcciones
Wire.write(0); // empieza en cero (encender MPU-6500)
Wire.endTransmission(true);
}
void loop() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B); // se empieza con el registro 0x3B salida del acelerómetro(ACCEL_XOUT_H)
Wire.endTransmission(false); // Parámetro que indica que el Arduino mandara reset. O se mantendrá la conexión activa.
Wire.requestFrom(MPU_ADDR, 7 * 2, true); // solicitud de 14 registros
// "Wire.read()<<8 | Wire.read();" significa 2 registros son leídos y guardados en la misma variable
a_x = Wire.read() << 8 | Wire.read(); // lectura del registro para acelerómetro: 0x3B (A_XOUT_H) y 0x3C (A_XOUT_L) (HIGH/LOW)
a_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x3D (A_YOUT_H) y 0x3E (A_YOUT_L)(HIGH/LOW)
a_z = Wire.read() << 8 | Wire.read(); //lectura del registro: 0x3F (A_ZOUT_H) y 0x40 (A_ZOUT_L)(HIGH/LOW)
t = Wire.read() << 8 | Wire.read(); // lectura del registro para temperatura: 0x41 (T_OUT_H) y 0x42 (T_OUT_L)(HIGH/LOW)
g_x = Wire.read() << 8 | Wire.read(); // lectura del registro para giroscopio: 0x43 (G_XOUT_H) and 0x44 (GYRO_XOUT_L)
g_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x45 (G_YOUT_H) and 0x46 (G_YOUT_L)
g_z = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x47 (G_ZOUT_H) and 0x48 (G_ZOUT_L)
m_x = Wire.read() << 8 | Wire.read(); // lectura del registro para magnetómetro
m_y = Wire.read() << 8 | Wire.read();
m_z = Wire.read() << 8 | Wire.read();
// Impresión de la información
Serial.print("aX = "); Serial.print(convert_int16_to_str(a_x));
Serial.print(" | aY = "); Serial.print(convert_int16_to_str(a_y));
Serial.print(" | aZ = "); Serial.print(convert_int16_to_str(a_z));
Serial.print(" | gX = "); Serial.print(convert_int16_to_str(g_x));
Serial.print(" | gY = "); Serial.print(convert_int16_to_str(g_y));
Serial.print(" | gZ = "); Serial.print(convert_int16_to_str(g_z));
Serial.print(" | mx = "); Serial.print(convert_int16_to_str(m_x + 200));
Serial.print(" | my = "); Serial.print(convert_int16_to_str(m_y -70));
Serial.print(" | mz = ");Serial.print(convert_int16_to_str(m_z -700));
Serial.println();
// espera 1s para la siguiente lectura
delay(1000);
}
ENLACES EXTERNOS
Productos relacionados
-
$9,30Vista rápida
El Si7021 es un sensor digital de humedad y temperatura digital de bajo costo y fácil de usar. Este sensor es ideal para la detección del medio ambiente y el registro de datos y es perfecto para la construcción de estaciones meteorológicas o un sistema de control de humedad. Todo lo que necesita son dos líneas para de comunicación I2C y tendrá lecturas de humedad relativa y lecturas de temperatura muy precisas !
-
$2,90Vista rápida
El sensor ultrasónico HC-SR04 que sirve para medir distancias por medio de sus dos transductores: un micrófono y altavoz. Genera pulsos de alta frecuencia( no perceptible por el ser humano) que rebota en los objetos cercanos y es reflejado hacia el sensor, que es captado por un micrófono. Son sensores económicos y fácil de usar.
-
$3,52Vista rápida
Lector de Memorias Micro SD compatible con Arduino, es capaz de realizar la lectura de información contenida en una tarjeta micro SD a través del chip LVC125A.
-
$9,70Vista rápida
Display Oled SSD1306 I2C de 128×64 0.96 es un dispositivo electrónico tipo led, que permite controlar cada píxel individualmente y mostrar tanto texto como gráficos. Además por ser de tipo OLED no necesita de retroiluminación (Backlight) como los LCD, lo que hace que su consumo de energía sea mucho menor y aumenta su contraste.
-
$5,00Vista rápida
El IMU MPU6050 6 Grados de libertad es un circuito integrado que combina un giroscopio de 3-ejes y un acelerómetro de 3-ejes en el mismo chip, teniendo 6 grados de libertad(DoF).




Valoraciones
No hay valoraciones aún.