


$25,00
El módulo MPU-9250 9DOF realiza detección de movimiento en 9 ejes, ya que combina giroscopio de 3 ejes(3DOF), un acelerómetro de 3 ejes(3DOF) y un magnetómetro AK8963 de 3 ejes (3DOF) en el mismo chip DMP (Procesador digital de movimiento) capaz de realizar complejos algoritmos para la captura del movimiento de estos 9 ejes(9DOF). La comunicación puede realizarse tanto por bus SPI cómo por bus I2C, por lo que es sencillo obtener los datos medidos.
El módulo MPU-9250 9DOF realiza detección de movimiento en 9 ejes, ya que combina giroscopio de 3 ejes(3DOF), un acelerómetro de 3 ejes(3DOF) y un magnetómetro AK8963 de 3 ejes (3DOF) en el mismo chip DMP (Procesador digital de movimiento) capaz de realizar complejos algoritmos para la captura del movimiento de estos 9 ejes(9DOF). La comunicación puede realizarse tanto por bus SPI cómo por bus I2C, por lo que es sencillo obtener los datos medidos.
Contiene 10 pines header rectos para soldar a la placa.
¿Para qué sirve el el módulo MPU-9250 9DOF ?
El módulo MPU-9250 9DOF es usado para servicios basados en ubicación principalmente, pero mas estructurado funciona también para control /navegación de aplicaciones de interfaz usuario “sin contacto”, para atajos gestuales, juegos habilitados con movimientos, auriculares y juegos portátiles, controles remotos 3D para pantallas y decodificadores conectados a Internet, sensores portátiles para salud, fitness y deportes.
Frecuentemente se encuentran integrados en módulos que incorporan la electrónica necesaria para conectarla de forma sencilla a un Arduino. En la mayoría de los módulos, esto incluye un regulador de voltaje que permite alimentar directamente a 5V.
ESPECIFICACIÓN Y CARACTERÍSTICAS
- Módulo Modelo: GY-9250 /GY -6500
- Sensor: MPU-9250/6500
- Voltaje de alimentación: 3V a 5V (con regulador interno)
- Grados de libertad (DoF): 9
- Dimensiones: 26 mm x 15.5 mm x 2.6 mm (sin header)
- Interfaz:
- I2C (400kHz) y SPI (1MHz)
- Registros de interrupción SPI (20MHz.)
Características del Giroscopio
- Rango de Giroscopio: 250/500/1000/2000 grados/segundo
- Corriente de Operación: 3.2mA
- Corriente en modo sleep: 8uA
Características del Acelerómetro
- Rango de Aceleración: ± 2 ± 4 ± 8 ± 16 g
- Convertidor ADC: 16 bit
- Corriente de Operación: 450 uA
- Corriente en modo sleep: 8uA
Características del Magnetómetro
- Funcionamiento por Efecto Hall
- Corriente de Operación: 280µA a 8Hz
- Rango del campo magnético: ± 4800uT (completo)
- Sensibilidad: 0,6 μT/LSB
- Resolución de salida:
- 14 bit (0.6µT/LSB)
- 16 bit (15µT/LSB)
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
Uso de la interfaz I2C y conexión a Arduino.
El módulo utiliza la interfaz I2C para comunicarse con la MCU. Admite dos direcciones I2C diferentes; 0x68 y 0x69. Eso permite usar dos dispositivos en el mismo bus o en caso de que haya un conflicto de dirección con otro dispositivo en el bus.
El pin ADO determina la dirección I2C a usar. Este pin tiene una resistencia pull-down de 4.7K incorporada en el módulo. Si el pin se deja desconectado, la línea se reducirá y la dirección I2C predeterminada será 0x68. Para seleccionar 0x69, conecte el pin ADO a 3.3V.
Los pines SCL y SDA se conectan a los pines SCL y SDA en la MCU.
La dirección I2C auxiliar con pines etiquetados como EDA y ECL son un bus I2C controlado por el MPU-9250 para que pueda comunicarse directamente con otros sensores para que pueda obtener información adicional para sus cálculos internos.

Conexión del Arduino a MPU-9550 para interfaz de I2C
Código prueba para MPU -6050 GY-521
Se presenta el siguiente código con la finalidad de que puedas probar el funcionamiento del MPU , cabe mencionar que se requiere calibración y los datos arrojados son de fabrica. Para mas información revisar el datasheet.
#include "Wire.h" //Librería para poder comunicarse con dispositivos por I2C
const int MPU_ADDR = 0x68; // Dirección I2C del MPU-6050. Si AD0(0x69) HIGH, de lo contrario I2C(0x69)es LOW
int16_t a_x, a_y, a_z; // variables para el acelerómetro
int16_t g_x, g_y, g_z; // variables para giroscopio
int16_t m_x, m_y, m_z; // variables para magnetómetro
char tmp_str[7]; // variable temporal con 7 carácteres
char* convert_int16_to_str(int16_t i) { // variables para conversión de int16 a texto
sprintf(tmp_str, "%6d", i);
return tmp_str;
}
void setup() {
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(MPU_ADDR); // Comienza la comunicación entre GY-6500 por I2C
Wire.write(0x6B); // registro para direcciones
Wire.write(0); // empieza en cero (encender MPU-6500)
Wire.endTransmission(true);
}
void loop() {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B); // se empieza con el registro 0x3B salida del acelerómetro(ACCEL_XOUT_H)
Wire.endTransmission(false); // Parámetro que indica que el Arduino mandara reset. O se mantendrá la conexión activa.
Wire.requestFrom(MPU_ADDR, 7 * 2, true); // solicitud de 14 registros
// "Wire.read()<<8 | Wire.read();" significa 2 registros son leídos y guardados en la misma variable
a_x = Wire.read() << 8 | Wire.read(); // lectura del registro para acelerómetro: 0x3B (A_XOUT_H) y 0x3C (A_XOUT_L) (HIGH/LOW)
a_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x3D (A_YOUT_H) y 0x3E (A_YOUT_L)(HIGH/LOW)
a_z = Wire.read() << 8 | Wire.read(); //lectura del registro: 0x3F (A_ZOUT_H) y 0x40 (A_ZOUT_L)(HIGH/LOW)
t = Wire.read() << 8 | Wire.read(); // lectura del registro para temperatura: 0x41 (T_OUT_H) y 0x42 (T_OUT_L)(HIGH/LOW)
g_x = Wire.read() << 8 | Wire.read(); // lectura del registro para giroscopio: 0x43 (G_XOUT_H) and 0x44 (GYRO_XOUT_L)
g_y = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x45 (G_YOUT_H) and 0x46 (G_YOUT_L)
g_z = Wire.read() << 8 | Wire.read(); // lectura del registro: 0x47 (G_ZOUT_H) and 0x48 (G_ZOUT_L)
m_x = Wire.read() << 8 | Wire.read(); // lectura del registro para magnetómetro
m_y = Wire.read() << 8 | Wire.read();
m_z = Wire.read() << 8 | Wire.read();
// Impresión de la información
Serial.print("aX = "); Serial.print(convert_int16_to_str(a_x));
Serial.print(" | aY = "); Serial.print(convert_int16_to_str(a_y));
Serial.print(" | aZ = "); Serial.print(convert_int16_to_str(a_z));
Serial.print(" | gX = "); Serial.print(convert_int16_to_str(g_x));
Serial.print(" | gY = "); Serial.print(convert_int16_to_str(g_y));
Serial.print(" | gZ = "); Serial.print(convert_int16_to_str(g_z));
Serial.print(" | mx = "); Serial.print(convert_int16_to_str(m_x + 200));
Serial.print(" | my = "); Serial.print(convert_int16_to_str(m_y -70));
Serial.print(" | mz = ");Serial.print(convert_int16_to_str(m_z -700));
Serial.println();
// espera 1s para la siguiente lectura
delay(1000);
}
ENLACES EXTERNOS
Productos relacionados
-
$7,68Vista rápida
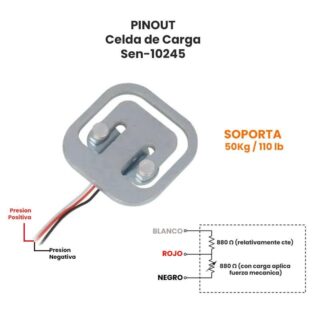
La Celda de Carga 50Kg Sen-10245 es un transductor que puede medir el peso o la fuerza y la convierte en una señal eléctrica, mediante un dispositivo mecánico, la fuerza que se desea medir deforma el sensor y convierte el desplazamiento o deformación en señales eléctricas. Soporta cerca de 110 libras (aproximadamente 50 Kg).
-
$44,90Vista rápida
Contamos con el Kit de 37 sensores ya sea en su presentación con caja o en bolsa; ambos son útiles para que puedas realizar aplicaciones en diversos proyectos, por ejemplo:
-
$7,50Vista rápida
Es una pequeña pantalla de tipo OLED de 0.91 pulgadas y resolución de 128×32 píxeles, es ideal para controlar cada píxel individualmente y mostrar tanto texto como gráficos. Este Display Oled tiene interfaz de comunicación I2C, puede ser controlado por las placas de Arduino, Nodemcu, ESP32 u otros microcontroladores que tengan puertos I2C, solo tienes que revisar el pinout de la placa a utilizar y conectar la pantalla.
-
$2,50Vista rápidaMódulo de relevadores (reles) para conmutación de cargas de potencia, ideal para cargas externas tales como bombillas, motores etc. Los contactos de los relevadores están diseñados para conmutar hasta 10 A y 250 VAC (5 VCD), aunque recomendamos dejar un margen hacia abajo de estos límites. Las entradas de control se encuentran protegida con un diodo para minimizar el ruido percibido por el circuito de control mientras se realiza la conmutación de la carga. La señal de control puede provenir de cualquier circuito de control TTL o CMOS como un microcontrolador.
-
$9,30Vista rápida
El Si7021 es un sensor digital de humedad y temperatura digital de bajo costo y fácil de usar. Este sensor es ideal para la detección del medio ambiente y el registro de datos y es perfecto para la construcción de estaciones meteorológicas o un sistema de control de humedad. Todo lo que necesita son dos líneas para de comunicación I2C y tendrá lecturas de humedad relativa y lecturas de temperatura muy precisas !




Valoraciones
No hay valoraciones aún.