



$4,80
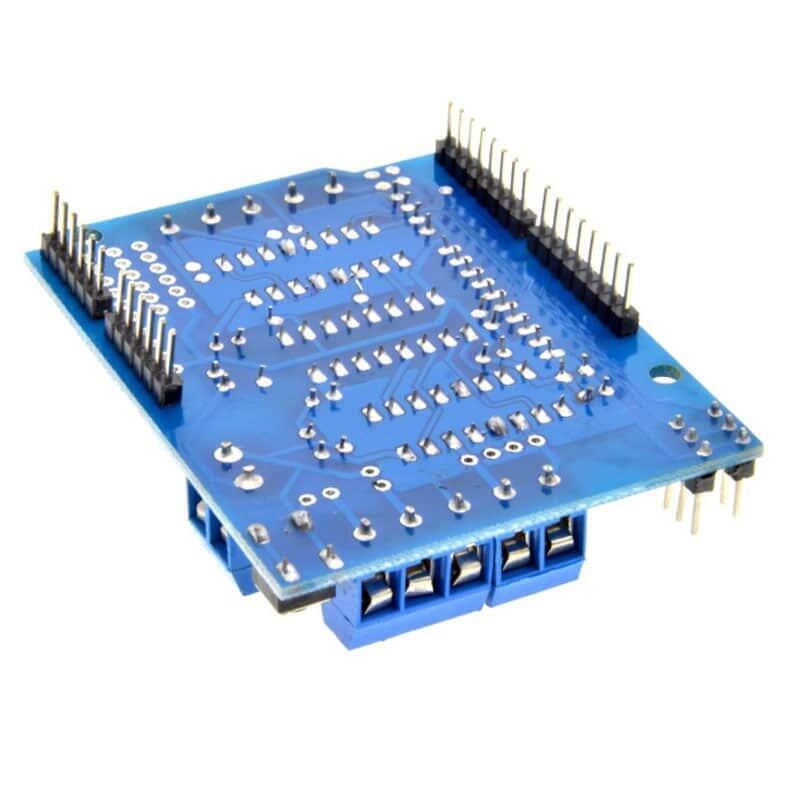
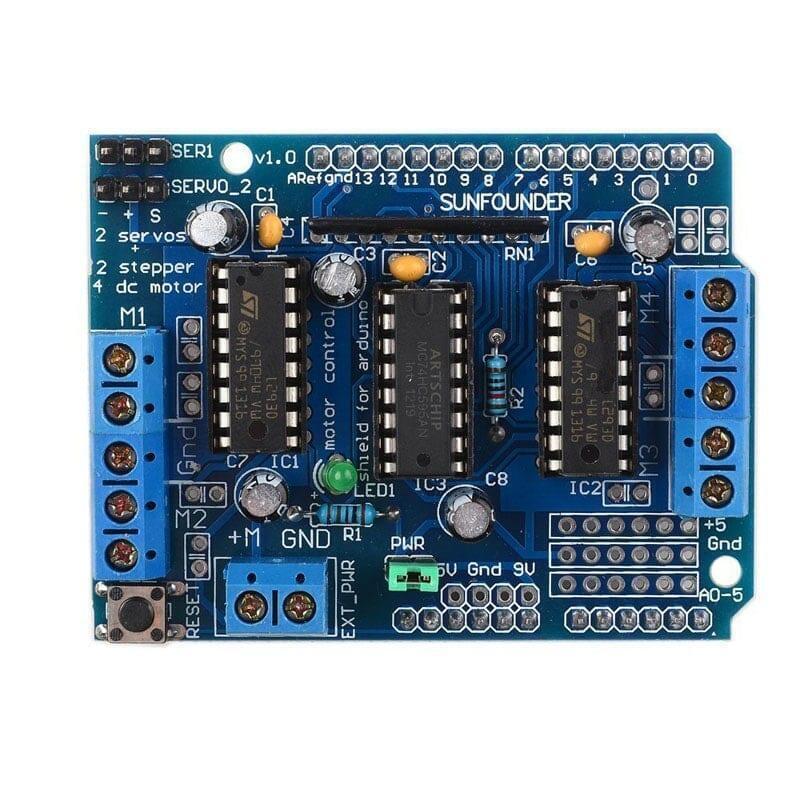
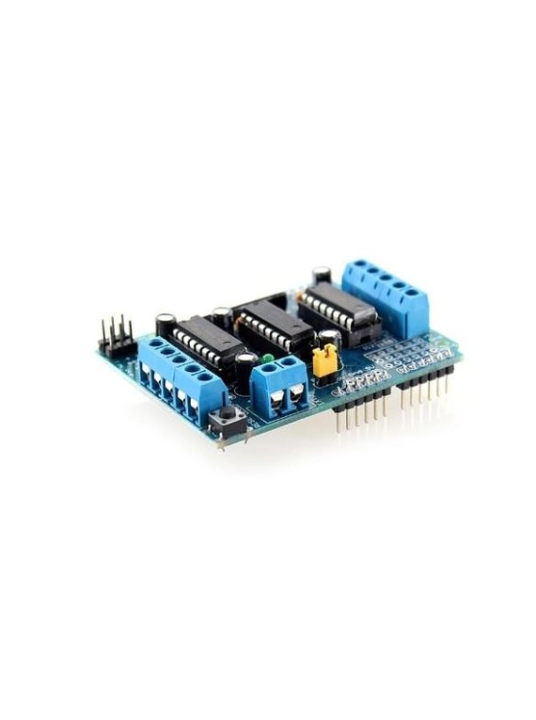
¿Qué es el Shield? Este tipo de modulo control de motores L293d tiene la capacidad de controlar hasta cuatro motores de corriente directa, dos servomotores, cuatro solenoides, cuatro relevadores y dos motores a pasos unipolares o bipolares. Sus elementos principales son dos circuitos integrados (L293D) que los permiten manipular el sentido de giro mediante cuatro puentes h y un registro de desplazamiento (SN74HC595N). Esta diseñada para ser montada al arduino uno o mega.
¿Qué es el Shield? Este tipo de modulo control de motores L293d tiene la capacidad de controlar hasta cuatro motores de corriente directa, dos servomotores, cuatro solenoides, cuatro relevadores y dos motores a pasos unipolares o bipolares. Sus elementos principales son dos circuitos integrados (L293D) que los permiten manipular el sentido de giro mediante cuatro puentes h y un registro de desplazamiento (SN74HC595N). Esta diseñada para ser montada al arduino uno o mega.
¿Para que sirve? Con este modulo puedes manipular la velocidad y el sentido de giro hasta de cuatro motores, dos servo motores de SG90 o MG995 y dos motores paso a paso., entre otros.
¿Cómo funciona? Cuando requieras utilizar motores que demanden demasiada corriente es necesarios que alimentes a la placa una fuente externa, esto permitirá que operen de manera correcta. Una vez realizado esto puedes conectar los motores que desees controlar. Recuerda que este modulo control de motores L293d debe ser programada en lenguaje C a través del ARDUINO IDE.
ESPECIFICACIONES TÉCNICAS Y CARACTERÍSTICAS
- Alimentación externa entre 4.5 a 25 VCD
- Control de velocidad de motores DC con resolución de 8 bits
- Control de motores paso a paso con 1 y 2 bobinas en modo sencillo, doble (mayor torque), intercalado (medio paso) y micro pasos 2 conectores independientes para controlar 2 servos pequeños de 5 V (Pines digitales 9 y 10)
- Protección contra sobre carga térmica
- Diodos de protección contra voltajes inversos generados por las cargas inductivas
- Corriente máxima continua en cada una de las salidas M1, M2, M3 y M4: 600 mA (0.6 A)
- Corriente máxima pico no repetitivo en cada una de las salidas M1, M2, M3 y M4: 1.2 A
- Resistores de pull-down que mantienen los motores deshabilitados durante el encendido
- Requiere fuente externa para la alimentación de las cargas en las salidas M1, M2, M3 y M4
- Botón de reset para la placa Arduino
- Compatibilidad probada con Arduino Diecimila, Duemilanove, UNO y Mega 1280 & 2560
TUTORIALES
DOCUMENTACIÓN Y RECURSOS
- Guía de usuario / modulo motor shield l293d
- Diferentes conexiones de dispositivos a controlar
- Datasheet l293d
- Pinout
- Modelo 3D
INFORMACIÓN ADICIONAL
¿Cómo conectar el modulo Shield?
Los motores de corriente directa se conectan en M1 donde corresponden a la primera ranura y segunda. Para el segundo motor se conectan en el M2 que corresponden a la cuarta y quinta ranura. El pin del centro se utiliza para controlar motores paso a paso. Esta misma configuración se utiliza en el M3 y M4. En el caso de motores es posible controlar tanto su velocidad como su dirección de giro.
¿Cómo alimentar los servos?
Las salidas para los servos toman su alimentación directamente de los 5 volts de la placa de Arduino, por lo que se recomienda utilizar pequeños servos tipo hobby.
¿Cómo alimentar servos qué consuman más corriente?
Si requieres emplear servos más grandes de alto consumo de corriente, se recomienda que corte la pista de alimentación V+ en la shield ó el cable positivo del servo y provea su propia fuente a estos. No olvide conectar las tierras correspondientes.
¿Cómo suministrar con una fuente externa?
La alimentación de los motores u otras cargas inductivas la puedes suministrar con una fuente externa, lo único qué tienes qué hacer es retirar el jumper para que el modulo entre en modo alimentación externa. Si utiliza el conector de tornillo del shield tenga en cuenta la polaridad, ya que esta entrada no cuenta con diodo de protección de polaridad y una conexión errada resultará en el daño del modulo y de la placa Arduino. Tampoco conecte la salida regulada de 5 volts ó 3.3 volts de la placa arduino a esta entrada.
ENLACES EXTERNOS
Productos relacionados
-
$11,90Vista rápida
ESP32 de 38 Pines es una placa de desarrollo que integra el microcontrolador ESP32-WROOM-32 SMD de Espressif. Esta placa permite controlar todo tipo de sensores, módulos y actuadores mediante WIFI y BLUETOOTH, para proyectos de Internet de las cosas “IoT” de forma eficiente y económica. Cuenta con micro USB de tipo B para ser alimentado y para programar el ESP32 he igual integra el controlador USB a UART CP2102.
-
$4,50Vista rápida
Es una pequeña pantalla de tipo OLED de 0.91 pulgadas y resolución de 128×32 píxeles, es ideal para controlar cada píxel individualmente y mostrar tanto texto como gráficos. Este Display Oled tiene interfaz de comunicación I2C, puede ser controlado por las placas de Arduino, Nodemcu, ESP32 u otros microcontroladores que tengan puertos I2C, solo tienes que revisar el pinout de la placa a utilizar y conectar la pantalla.
-
$7,50Vista rápida
Modulo DS3231 de tiempo real RTC lo podrás integrar a tus proyectos para que tengan la capacidad de almacenar y llevar la cuenta de fecha y hora, este modulo es compacto y de fácil utilización ya que tiene una interfaz de comunicación I2C para establecer comunicación con tarjetas de desarrollo o microcontroladores. Este modulo DS3231 de tiempo real incorpora una memoria EEPROM 24C32, que permite el almacenamiento de eventos, horarios o para crear un datalogger de temperatura utilizando muy pocos pines de microcontrolador. Además este modulo incluye batería de Lithium de 3V modelo CR2025 para su funcionamiento.
-
$2,00Vista rápida
El circuito integrado 74HC595 es un registro de desplazamiento que cuenta con entrada en serie y salida en paralelo de 8 bits (SIPO). Se alimenta un registro de almacenamiento de tipo D.
-
$3,00Vista rápida
INFORMACIÓN
Teclado Matriz 4×4 es un simple arreglo de botones conectados en filas y columnas, de modo que se pueden leer varios botones con el mínimo número de pines requeridos.





Valoraciones
No hay valoraciones aún.